

As part of a Summer Scholarship at the University of Canterbury , I developed a system for detecting fire hotspots using thermal imaging cameras and remotely piloted aircraft systems (RPAS). The project was part of a group of four fire-related research projects, organized by Tait Communications and SCION .
It was an amazing learning experience as I got to experiment with many different technologies, such as OpenCV, quadcopters, thermal imaging cameras, and mapping algorithms. I also got to talk to some interesting people within the fire industry about what it’s really like to be out on the fireground.
Background
Fire hotspots are a real problem when fighting large rural fires, as they can remain undetected long after the fire has been extinguished, potentially re-igniting the fire and endangering homes and property. Currently firefighters have to hire an expensive helicopter and trained crew, who then fly over with a thermal imaging camera and manually drop down markers on top of the hotspots. Unfortunately helicopters are not always available after a fire, in which case they must instead locate the hotspots manually using the back of their hands, which can take a very long time over large firegrounds!
Fire hotspots are not easy to locate with normal vision, since they are usually buried underneath ash or burn inside tree stumps. Thankfully the invention of far-infrared thermal imaging cameras has made this kind of thing very easy to detect:

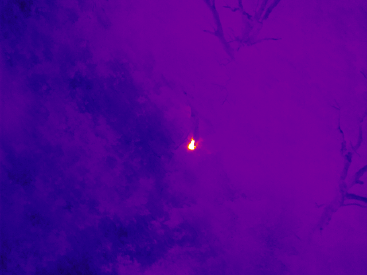
As you can see from the photos above, the thermal photo quite clearly shows the hotspots which were otherwise completely invisible! Some hotspots can be in excess of 150°C, more than enough to re-ignite the fire if a substantial wind picks up the embers.
Project Overview
The reason for my project was to make it easier, safer, and cheaper to detect fire hotspots, and hopefully with more accuracy than current methods. The basic idea was to combine a Remotely Piloted Aircraft System (RPAS) with a small lightweight thermal imaging camera, and then be able to detect and locate hotspots from the captured imagery and data.

The actual algorithm was split up into two parts: the hotspot detection, and the geo-location of the hotspots. Detecting hotspots is actually fairly easy to do, though I can’t go into details about it here. Finding the real-world co-ordinates of the hotspots is a lot trickier to do, as you have to worry about things like the RPAS’s rotation, the ground elevation, and the camera parameters. The calculations behind that part are actually quite similar to the algorithms behind raytracers!
My algorithm was able to automatically detect and locate hotspots to within 50 meters or so, with no user intervention. I tested it on a fly-over of a power station, which easily picked out some transformers that were running quite hot:
 Hotspots detected in image
Hotspots detected in image Geo-located hotspots on map
Geo-located hotspots on mapOverall, it was a good project and I learnt a lot about both programming and the industry. I am hoping to extend it into my final year research project for my degree, where I’d like to turn it into a fully functioning system.
The content on this page was reproduced with permission of Tait, and may not be used or copied.